Princess – Walking Robot Dog
Role: Co-Designer & Lead Programmer | Columbia Univerity SHAPE Advanced Robotics (Summer 2025)
Tools: Arduino (C++), OnShape, Inverse Kinematics,Servos, Breadboarding
Overview:
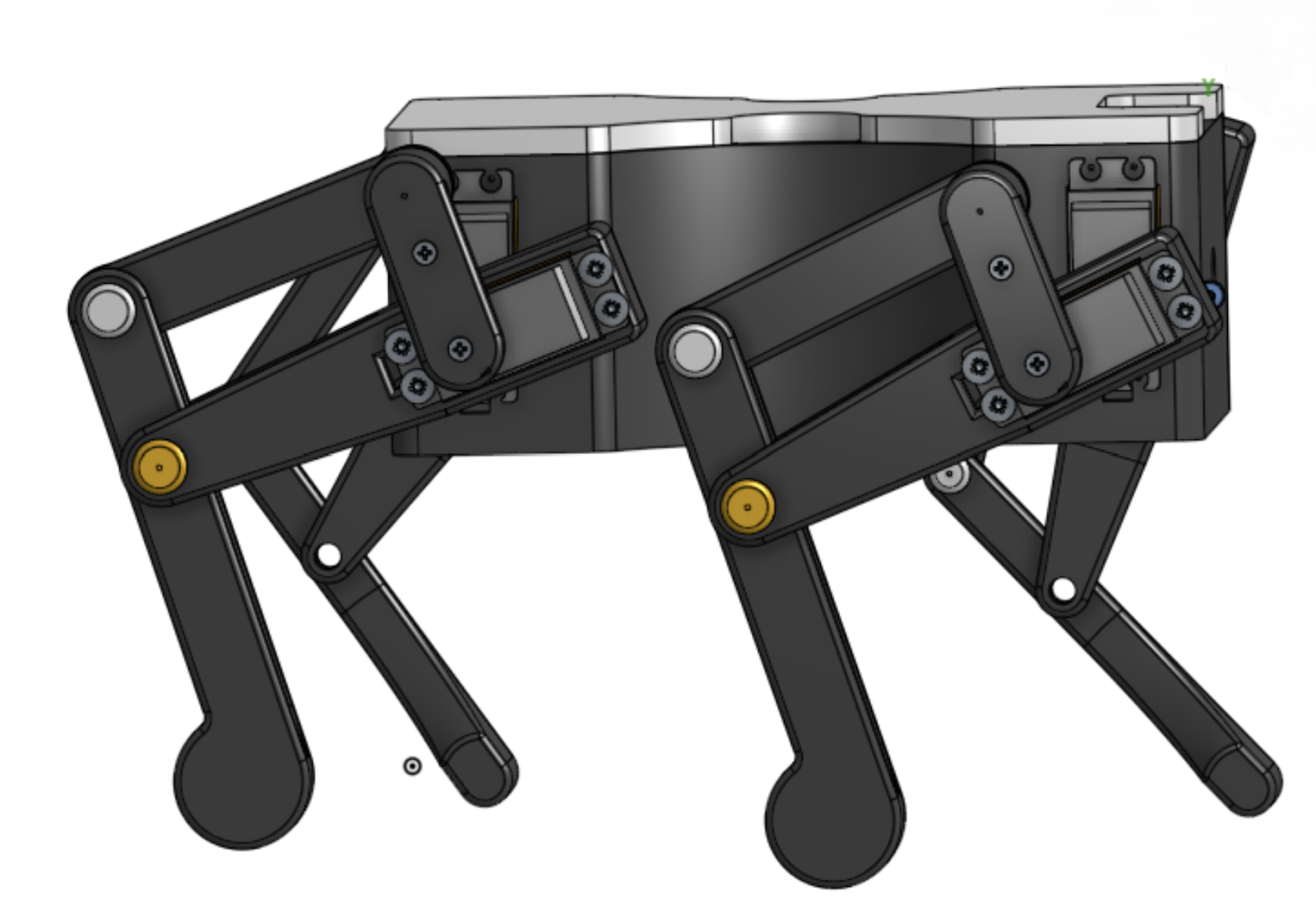
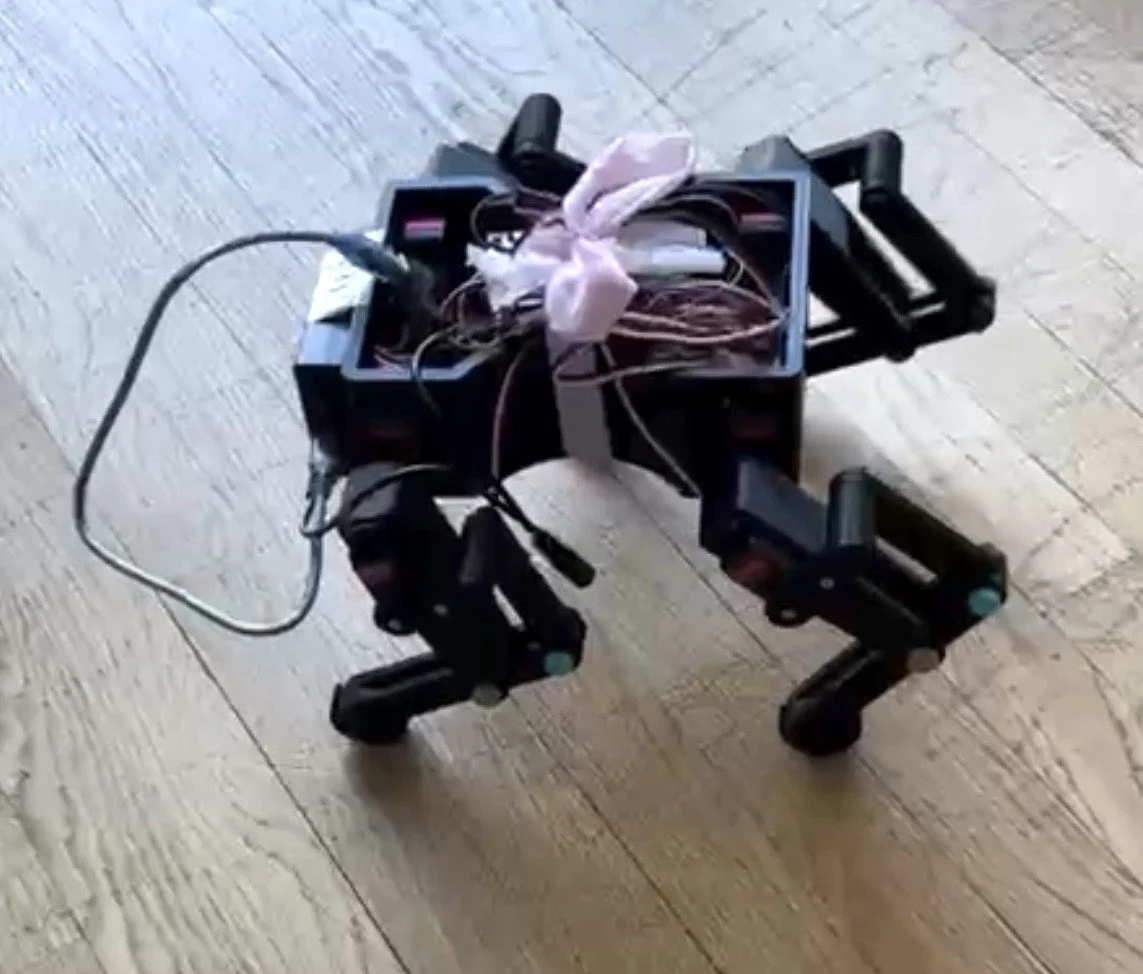
Princess is a servo-driven quadruped robot built to simulate realistic gait motion through precision mechanical control. Although originally designed off of the Boston Dynamics robot Spot, we also took inspiration from many other quadrupeds.
Engineering Process:
To begin, me and my partner did much research to find the optimal leg formation and gait for our robot. After deciding on having a robot with its knees bending backwards, as with most robot quadrupeds, we began to design our robot in OnShape. I took the primary role of deciding on the design, such as implementing the usage of a four bar linkage. After printing and assembling our robot and installing all 8 servo motors, I took on the task of coding its movements on Arduino. By utilizing Inverse Kinematics I was able to design a program that allowed the robot to walk in a two beat gait. However, we realized that this gait was very unstable as the robot was essentially just falling onto its legs, so we soon switched to a tripod gait, in which there are always three legs touching the ground at a time.
Impact:
The robot demonstrates biomimetic locomotion principles applicable to search-and-rescue robotics and rehabilitation devices. In addition it served as a great form of experience for me to develop my skills as well as learn new abilities.
Images and Videos: